I'm an engineer who thrives at boundaries — where control theory meets embedded software, where machine learning
meets motor physics, and where research ideas become production code. I hold a Ph.D. in Electrical Engineering (Control)
from Ferdowsi University of Mashhad, and spent four years as a postdoctoral researcher at Michigan State University
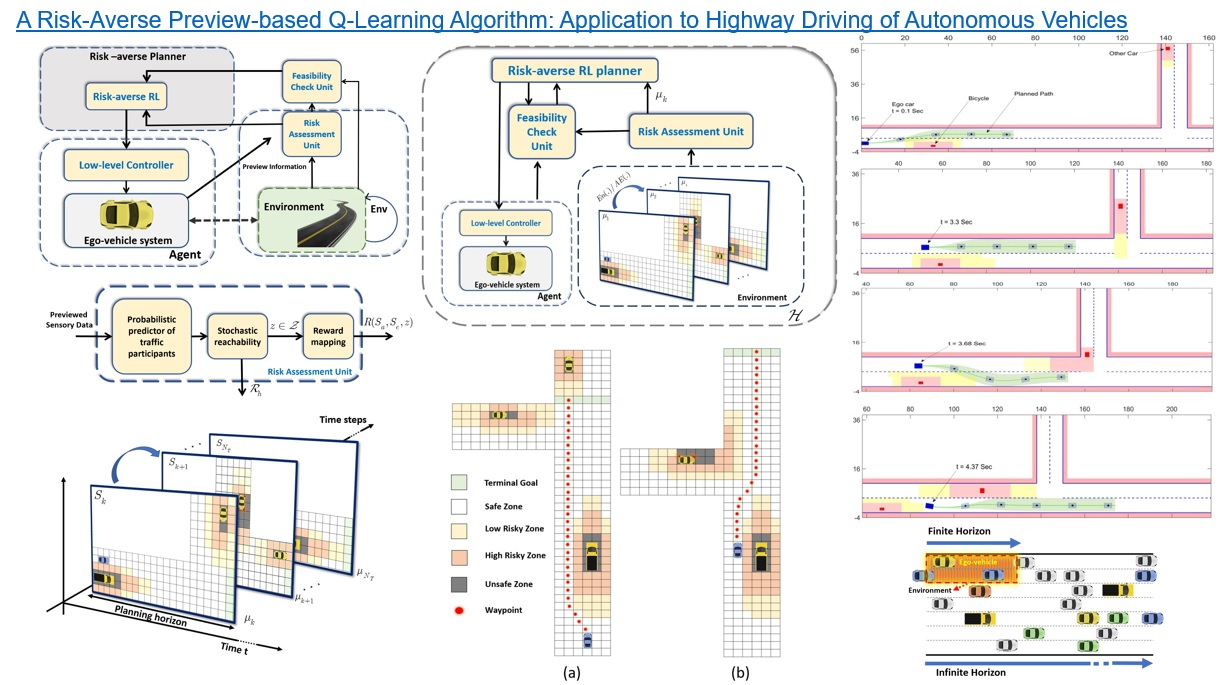
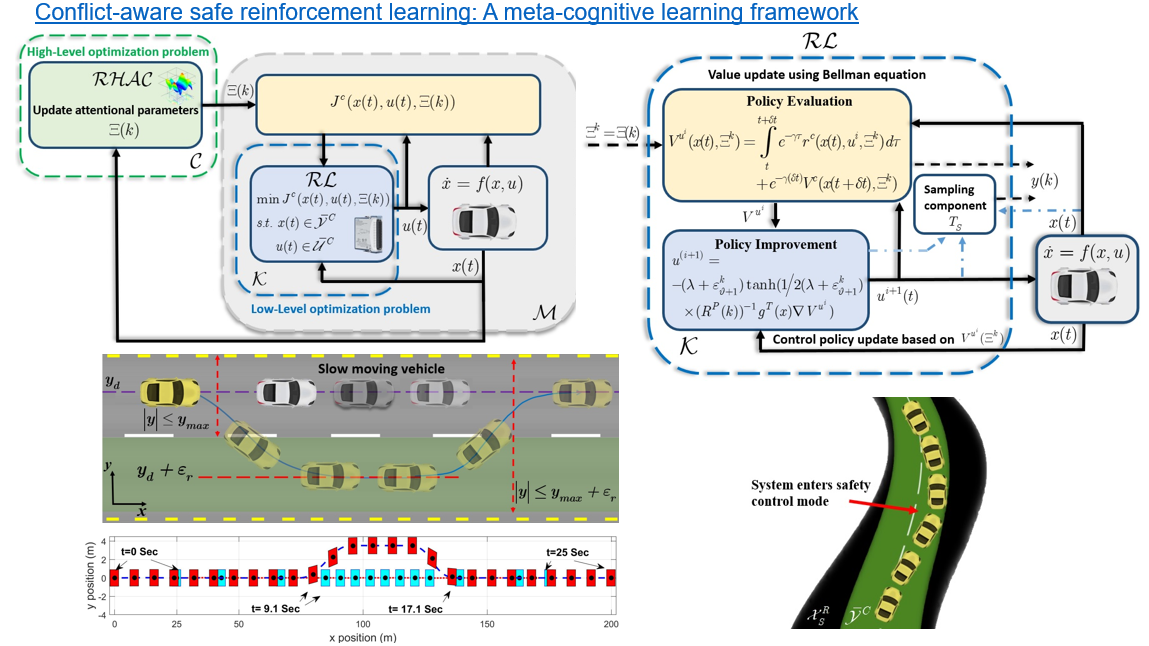
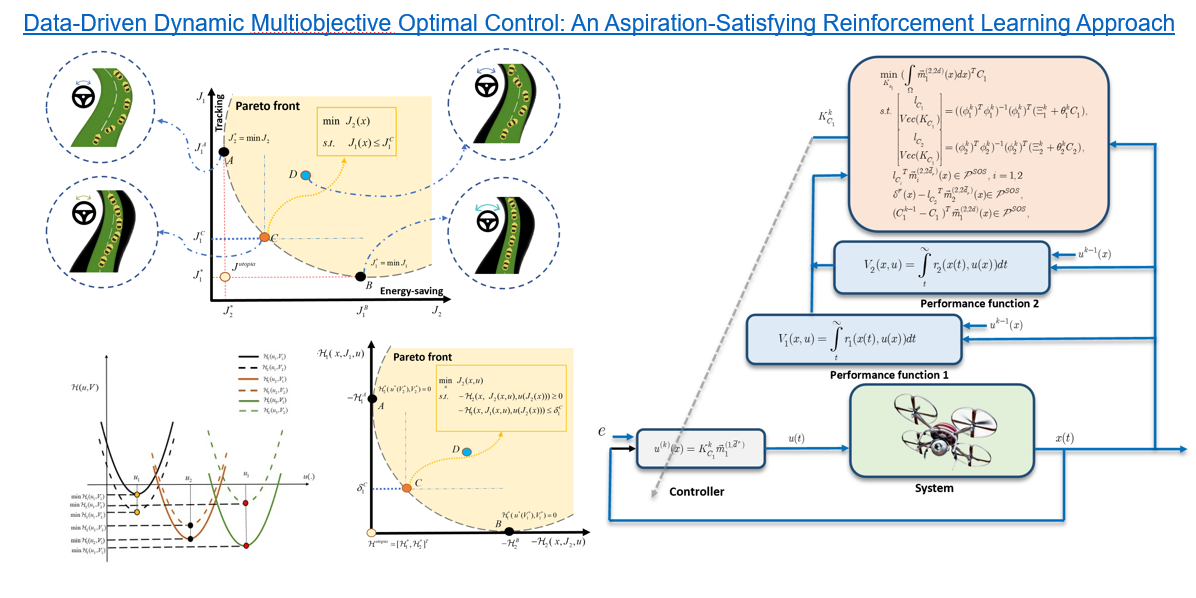
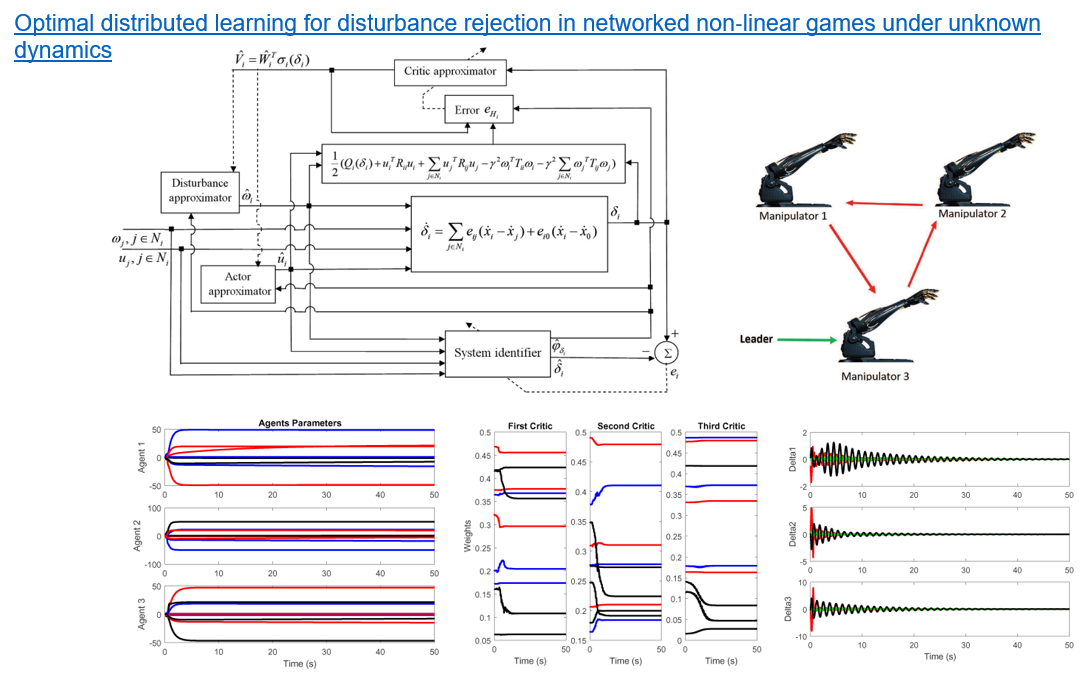
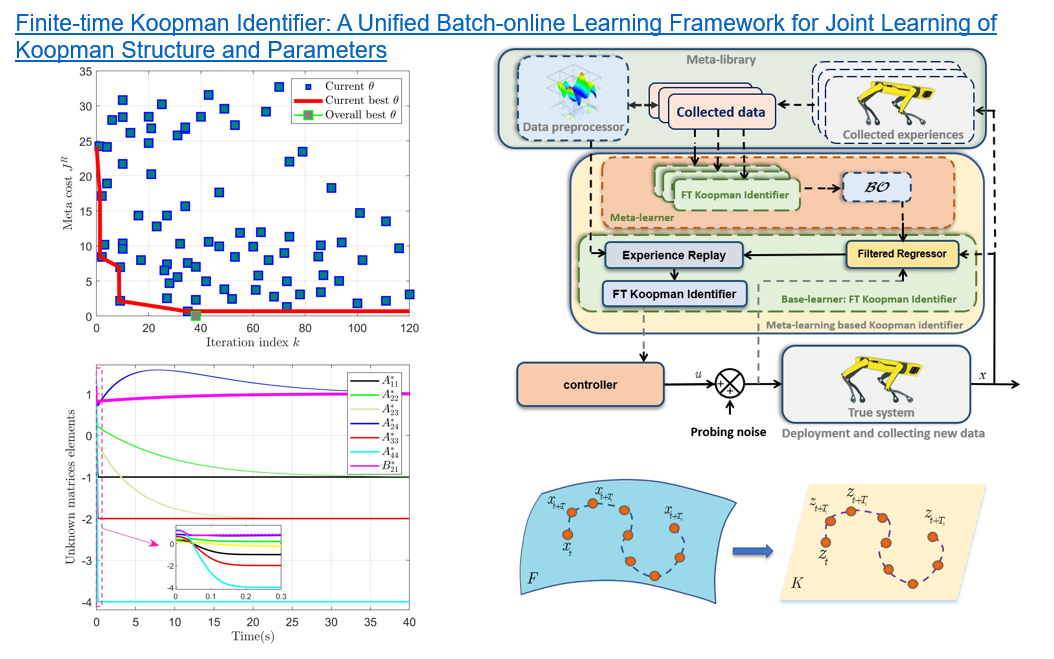
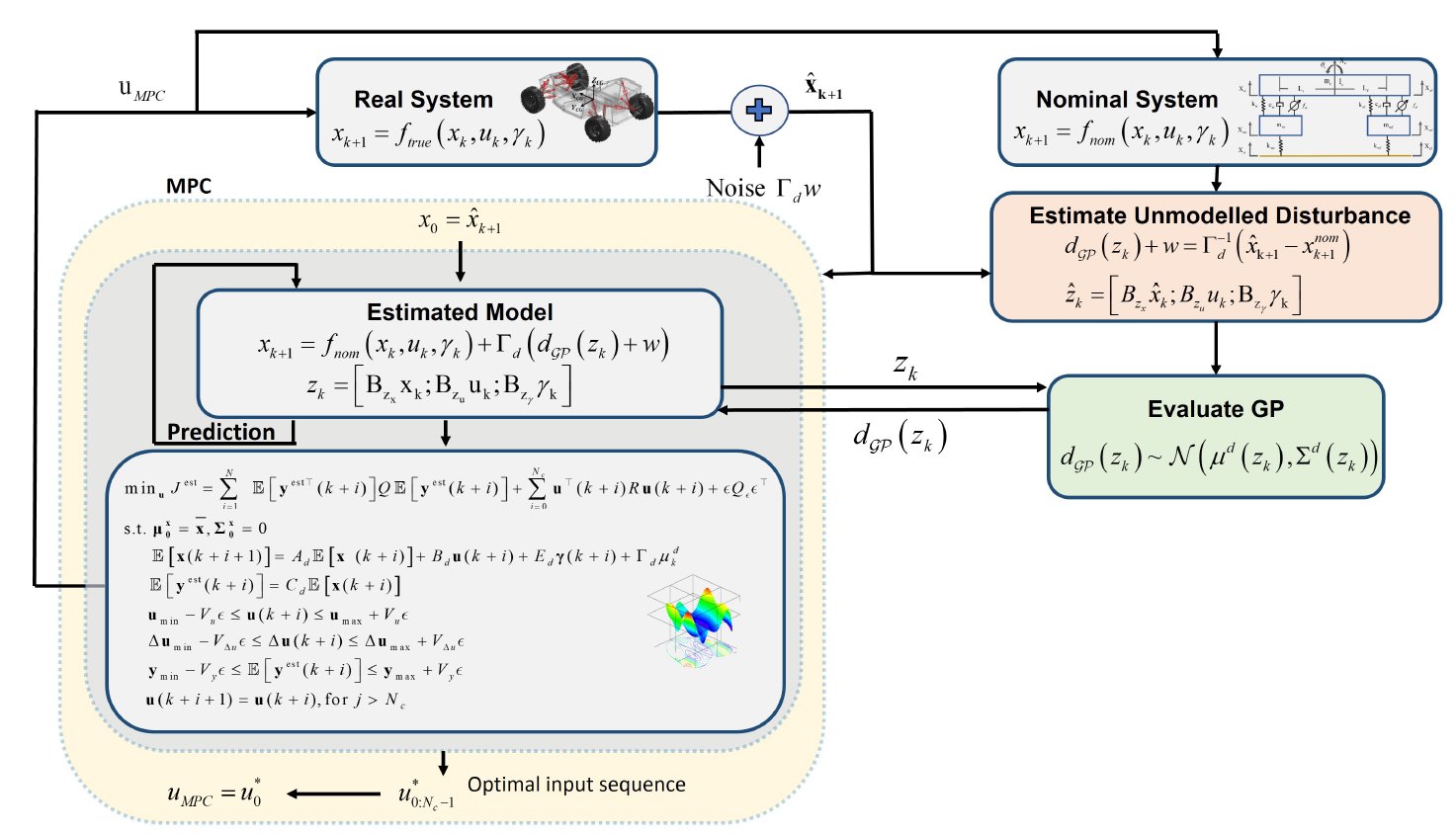
collaborating with Ford Motor Company on safe reinforcement learning for autonomous vehicles, Koopman-based dynamics
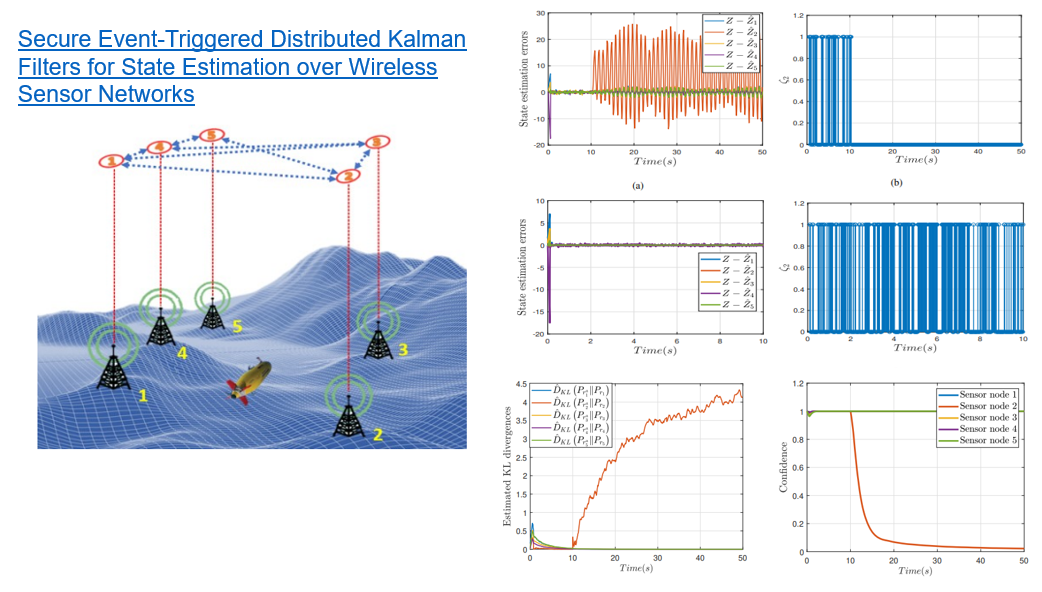
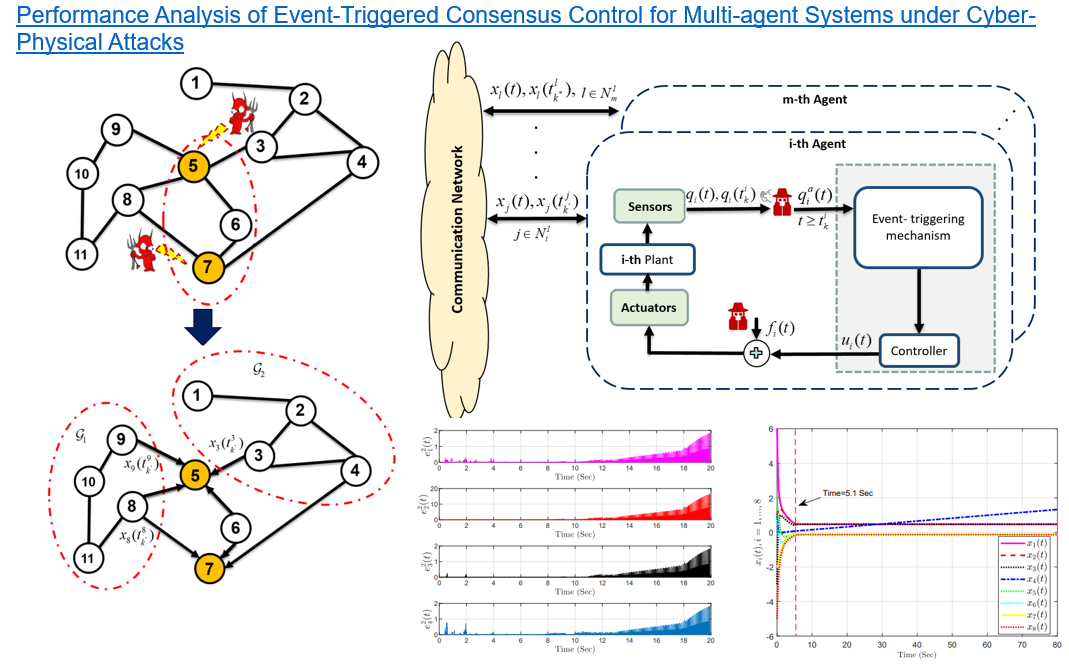
modeling, and distributed multi-agent decision-making.
At Mercedes-Benz R&D, I own features end-to-end — from algorithm design through TargetLink implementation to
HiL/dyno/vehicle validation. My recent work includes adaptive harmonic current suppression and a neural network
flux predictor deployed on Infineon TriCore, both backed by patent disclosures. On the tooling side, I build
AI-powered platforms that automate documentation, generate requirements, and accelerate calibration workflows
for the motor control team.
I'm driven by the idea that the best engineering happens when deep domain knowledge meets modern AI — and I
enjoy building the bridges between those worlds. Outside of work, I'm usually on a volleyball court.
Motor Control
PMSM & Axial Flux Machine control, MTPA/MTPV optimization, adaptive harmonic current suppression, NN flux prediction, flux map stitching & smoothing
Model-Based Development
Simulink, TargetLink, Stateflow, Simscape, Plecs, AUTOSAR, ASIL-compliant development, IEEE-754 numerics, fixed-point implementation
Prototyping & Validation
dSPACE MicroAutoBox & SCALEXIO, Plexim RT Box, HiL/Dyno/Vehicle testing, CANoe, CANape, CarSim, rapid prototyping
AI / ML for Control
Reinforcement learning, neural networks, Gaussian process regression, PINNs, LangGraph/ReAct multi-agent, RAG systems, model compression for TriCore MCUs
Languages & Tools
MATLAB, Python, C, C++, HTML/JS, Git, Bash, LabView, ROS