Hi, I'm Majid-Mazouchi.
A
control system engineer and passionate researcher with a curious mind who enjoys solving challenging and complex problems in the real world. As a researcher, my passion is mostly to develop innovative data-driven control schemes that provide stability, better performance, and autonomy capability for safety-critical systems such as autonomous vehicles, robots, and self-driving cars.
About
I was born in Tehran, Iran. I received my B.Sc. degree in electrical engineering in the field of control from K. N. Toosi University of Technology, Tehran, Iran, in 2007,
and my M.Sc. and Ph.D. degrees in electrical engineering in the field of control from the Ferdowsi University of Mashhad, Mashhad, Iran, in 2010 and 2018, respectively.
I was a Senior Lecturer at Semnan University, Semnan, Iran, from 2017 to 2018. I currently serve as a Postdoctoral Research Associate with the Electrical Engineering Department at Michigan State University, East Lansing, MI, USA.
I am also a Guest Associate Editor of the Frontiers in Control Engineering: Adaptive, Robust and Fault Tolerant Control, and I serve as a
Reviewer for several international journals and conferences, including the IEEE TRANSACTIONS ON AUTOMATIC CONTROL, AUTOMATICA, IEEE TRANSACTIONS ON NEURAL NETWORKS
AND LEARNING SYSTEMS, IEEE TRANSACTIONS ON SYSTEMS, MAN AND CYBERNETICS: SYSTEMS, and IEEE/CAA JOURNAL OF AUTOMATICA SINICA.
My research involves several disciplines: control theory, reinforcement learning, vehicle dynamics control, model predictive control, game theory,
safety-critical systems, safe autonomy, self-driving car, robotics, wind turbine, automation, and cyber-physical systems. To be more specific, machine learning techniques and learning-based approaches
are leveraged in my works to develop control system solutions with behavioral plasticity (adaptability, generalizability, and learning capability), safety,
satisficing performance, robustness, and stability where traditional approaches cannot provide any solutions.
- Research Interest: Safety-Critical Systems, Reinforcement Learning for Control Systems, Self-driving Cars, Robotics, Wind Turbine, Advanced Driver Assistance Systems (ADAS), Resilient Control, Multi‑agent systems, Distributed Control, Game Theory, Learning for Dynamics, Temporal Logic, Failure Mode and Effects Analysis (FMEA), Vehicle Dynamics Control, Autonomous Vehicle.
- Control Engineering: Linear and Non-linear control, Optimal control, Neural network control, Adaptive and Robust control, Model Predictive Control, Kalman Filter, Convex Optimization, Networked and Embedded Control Systems
- Machine Learning: Reinforcement Learning, Deep Learning, Gaussian Process Regression, Bayesian Optimization, Neural Network
- Languages: MATLAB, Python, C, C++, HTML
- Software/Hardware: Simulink, Stateflow, Simscape, CarSim, Allen-Bradley Programmable Logic Controller (PLC), PLC Programming (SCL, FBD, Ladder, Graph), Human Machine Interface (HMI), Git, Bash, LabView, ROS, Webots, Gazebo, CoppeliaSim, CARLA Simulator, Raspberry Pi/Jetson Nano, Arduino, Allen-Bradley Micro850 PLC
Besides research, I enjoy playing chess, fishing, and kayaking.
Seeking for an opportunity to work in a challenging position combining my expertise in Control System Engineering, Automation, Machine Learning, and Software Engineering, which will allow me to develop professionally, gain interesting experiences, and expand my experience base.
Work Experience
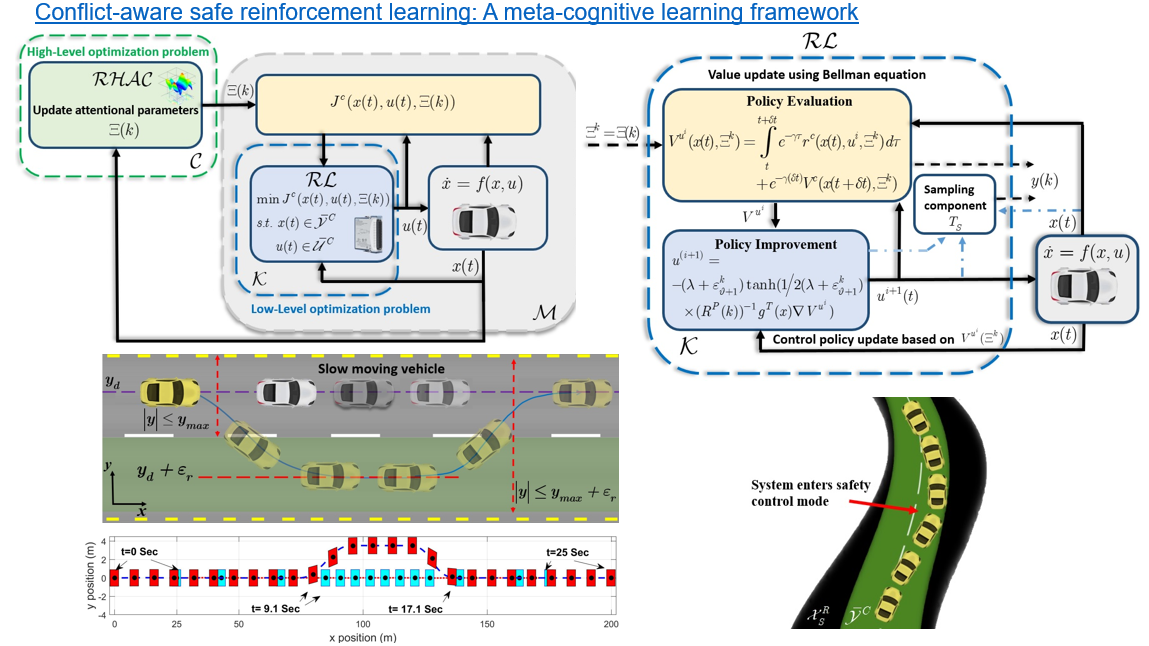
- I worked with Ford Motor Company to develop an assured autonomous control framework by empowering RL algorithms with metacognitive learning capabilities to guarantee performance while assuring satisfaction of safety constraints across variety of circumstances.
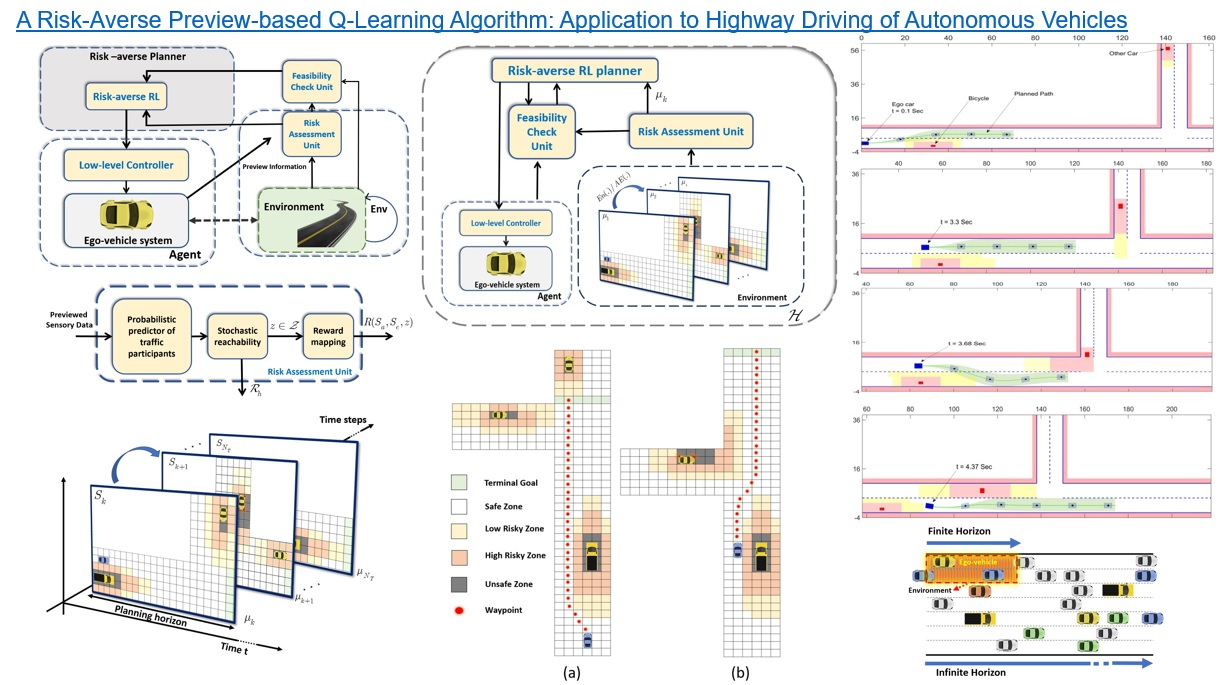
- I worked with Ford Motor Company to develop a risk-averse high-level planner for the navigation of autonomous vehicles between lanes around static and moving obstacles.
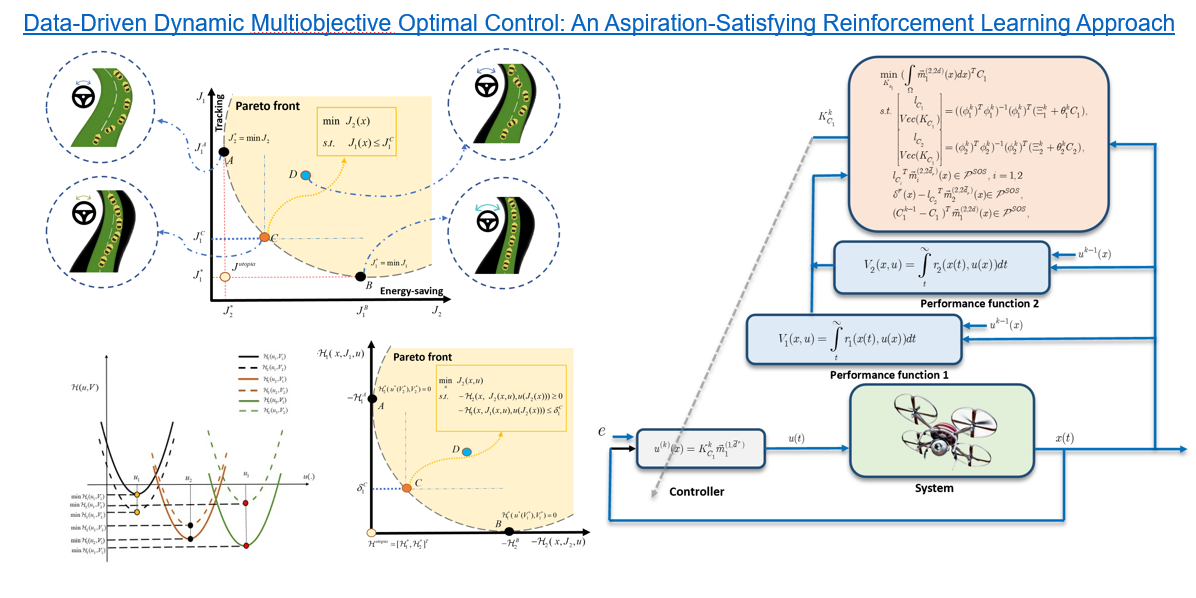
- I developed an iterative data-driven algorithm for solving dynamic multiobjective optimal control problems arising in control of nonlinear continuous-time systems.
- I developed a distributed solution to the fully-heterogeneous containment control problem, for which not only the followers’ dynamics but also the leaders’ dynamics are non-identical.
- I developed a novel adaptive update law with discontinuous gradient flows of the identification errors, which leverages concurrent learning to guarantee the learning of uncertain nonlinear dynamics in a fixed time.
- I developed an information-theoretic approach to detect attacks and designed a meta-Bayesian approach in terms of confidence and trust values to mitigate the effect of attacks.
- I developed a data-driven method for solving the closed-loop state-feedback control of a discrete-time LQR problem for systems affected by multiplicative norm bounded model uncertainty.
- I developed a novel data-driven invariant-based safe control scheme for control of a nonlinear vehicle. The core idea was to use notions from set invariance theory to design a safe feedback controller directly by using an identified lifted-states linear system that approximately represents the nonlinear system model in a predefined subspace.
- Tools: Python, MATLAB
In this position, I have worked as a postdoctoral research associate in the Department of Mechanical Engineering at Michigan State University.
In specific, I am interested in safe reinforcement learning-based control and planner schemes with behavior plasticity and risk-averseness for highway driving of self-driving cars in an uncertain time-varying traffic density; analyzing novel model learning algorithms with finite-time and specified performance guarantees to learn the Koopman model of nonlinear vehicles in an online manner; designing novel distributed decision-making algorithms for interconnected self-driving cars that allow them to operate in nonstationary traffic density.
- I am working on developing learning-based controllers and estimation algorithms for electric vehicles operating on rough terrain to enhance their stability, safety, and ride performance.
- I performed extensive experiments on the developed controllers using CarSim software.
- I developed a preview-based active suspension control scheme by using model predictive control to enhance the stability and ride performance of the vehicle.
- I developed a preview-based active suspension control scheme with learning capability by using Gaussian model regression and model predictive control to enhance the stability, and ride performance of the vehicle in different terrains.
- I developed an anti-roll and yaw stabilizing controller to enhance the stability of the vehicle dynamics in rough terrains. Tools: Python, MATLAB, Simulink, Carsim
In this position, I am working as a postdoctoral research associate in the Department of Electrical Engineering at Michigan State University, where I am focusing on developing learning-based controllers for electric vehicles that operate on rough terrain to enhance their stability, safety, and ride performance.
Projects
A major objective of mine is to develop new algorithms and tools to address challenging problems related to control systems, vehicle dynamics and control, robotics, and optimization.
Main Research Interests: Safe Reinforcement Learning, Risk-Aware Control, Distributed Control, Planning, Autonomy, Vehicle Dynamics and Control, Identification and Estimation, and Optimization for Autonomous and Robotic Systems.
For more information see my publications.
Publications
Journal Papers
- M. Mazouchi, M. B. Naghibi-Sistani and S. K. H. Sani, "A novel distributed optimal adaptive control algorithm for nonlinear multi-agent differential graphical games," in IEEE/CAA Journal of Automatica Sinica, vol. 5, no. 1, pp. 331-341, Jan. 2018, doi: 10.1109/JAS.2017.7510784.
- M. Mazouchi, F. Tatari, B. Kiumarsi and H. Modares, "Fully-Heterogeneous Containment Control of a Network of Leader-Follower Systems," in IEEE Transactions on Automatic Control, doi: 10.1109/TAC.2021.3130878.
- M. Mazouchi, S. Nageshrao and H. Modares, "Conflict-Aware Safe Reinforcement Learning: A Meta-Cognitive Learning Framework," in IEEE/CAA Journal of Automatica Sinica, vol. 9, no. 3, pp. 466-481, March 2022, doi: 10.1109/JAS.2021.1004353.
- F. Tatari, M. Mazouchi and H. Modares, "Fixed-Time System Identification Using Concurrent Learning," in IEEE Transactions on Neural Networks and Learning Systems, doi: 10.1109/TNNLS.2021.3125145.
- M. Mazouchi, Y. Yang and H. Modares, "Data-Driven Dynamic Multiobjective Optimal Control: An Aspiration-Satisfying Reinforcement Learning Approach," in IEEE Transactions on Neural Networks and Learning Systems, doi: 10.1109/TNNLS.2021.3072571.
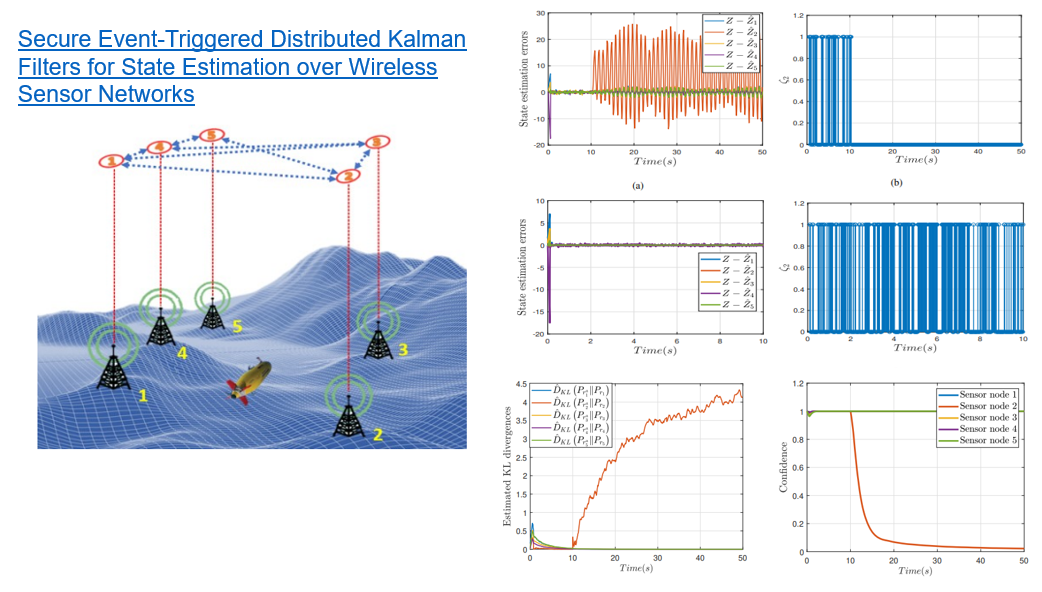
- A. Mustafa, M. Mazouchi and H. Modares, "Secure Event-Triggered Distributed Kalman Filters for State Estimation Over Wireless Sensor Networks," in IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2022, doi: 10.1109/TSMC.2022.3195121.
- A. Vahidi-Moghaddam, M. Mazouchi and H. Modares, "Memory-Augmented System Identification With Finite-Time Convergence," in IEEE Control Systems Letters, vol. 5, no. 2, pp. 571-576, April 2021, doi: 10.1109/LCSYS.2020.3004423.
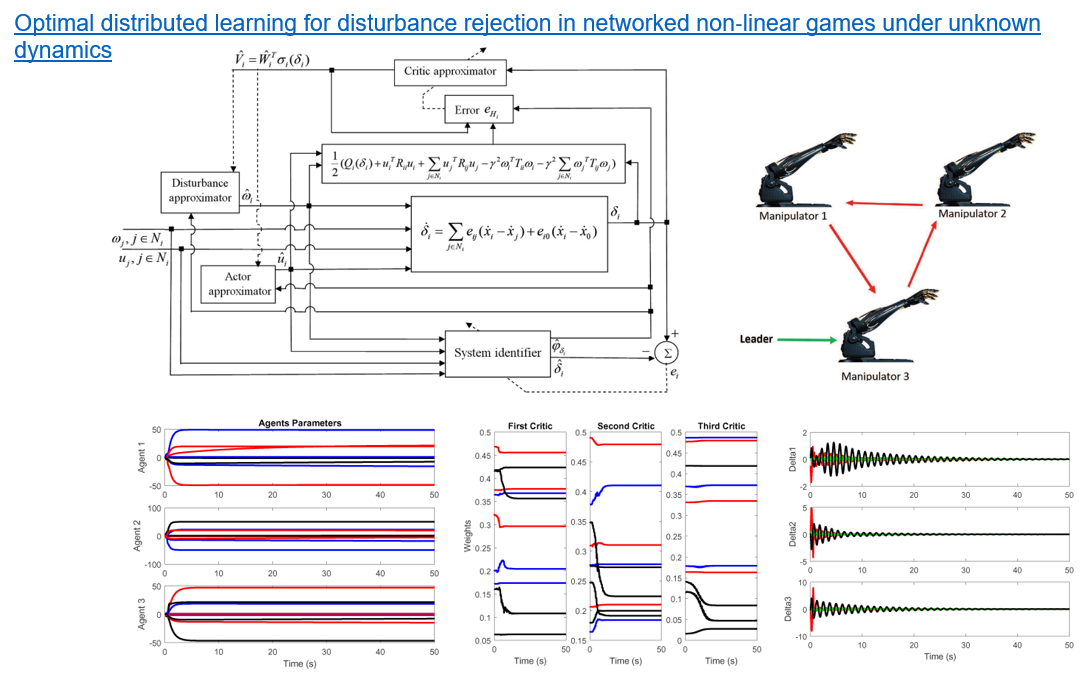
- F. Tatari, K. G. Vamvoudakis, and M. Mazouchi, “Optimal distributed learning for disturbance rejection in networked non‐linear games under unknown dynamics,” IET Control Theory & amp; Applications, vol. 13, no. 17. Institution of Engineering and Technology (IET), pp. 2838–2848, Nov. 2019. doi: 10.1049/iet-cta.2018.5832.
- M. Mazouchi, M. B. Naghibi-Sistani, S. K. Hosseini Sani, F. Tatari, and H. Modares, “Observer-based adaptive optimal output containment control problem of linear heterogeneous Multiagent systems with relative output measurements,” International Journal of Adaptive Control and Signal Processing, vol. 33, no. 2. Wiley, pp. 262–284, Nov. 13, 2018. doi: 10.1002/acs.2950.
- Y. Yang, M. Mazouchi, and H. Modares, “Hamiltonian‐driven adaptive dynamic programming for mixed H 2 / H ∞ performance using sum‐of‐squares,” International Journal of Robust and Nonlinear Control, vol. 31, no. 6. Wiley, pp. 1941–1963, Jan. 20, 2021. doi: 10.1002/rnc.5341.
- F. Tatari, M. R. Akbarzadeh T, and M. Mazouchi, “A Self-organized Multi Agent Decision Making System Based on Fuzzy Probabilities: The Case of Aphasia Diagnosis,” IJFS, vol. 11, no. 6, Dec. 2014, doi: 10.22111/ijfs.2014.1745.
- A. Mustafa, M. Mazouchi, S. Nageshrao, and H. Modares, “Assured learning‐enabled autonomy: A metacognitive reinforcement learning framework,” International Journal of Adaptive Control and Signal Processing, vol. 35, no. 12. Wiley, pp. 2348–2371, Sep. 06, 2021. doi: 10.1002/acs.3326.
- Z. Li, M. Mazouchi, H. Modares, X. Wang, and J. Sun, “Finite‐time adaptive output synchronization of uncertain nonlinear heterogeneous multi‐agent systems,” International Journal of Robust and Nonlinear Control, vol. 31, no. 18. Wiley, pp. 9416–9435, Sep. 14, 2021. doi: 10.1002/rnc.5779.
- Y. Han, M. Mazouchi, S. Nageshrao, and H. Modares, “A Convex Programming Approach to Data-Driven Risk-Averse Reinforcement Learning.” arXiv, 2021. doi: 10.48550/ARXIV.2103.14606.
- M. Mazouchi, S. Nageshrao, and H. Modares, “A Risk-Averse Preview-based Q-Learning Algorithm: Application to Highway Driving of Autonomous Vehicles.” arXiv, 2021. doi: 10.48550/ARXIV.2112.03232.
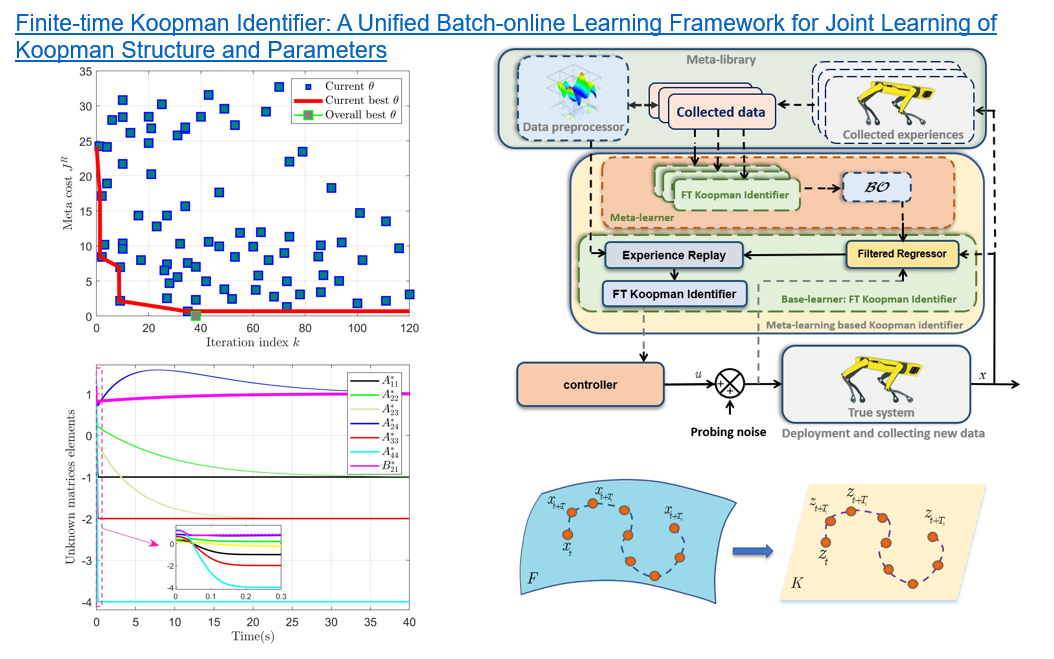
- M. Mazouchi, S. Nageshrao, and H. Modares, “Finite-time Koopman Identifier: A Unified Batch-online Learning Framework for Joint Learning of Koopman Structure and Parameters.” arXiv, 2021. doi: 10.48550/ARXIV.2105.05903.
- M. Mazouchi, F. Tatari, and H. Modares, “A Convex Optimization Approach for Control of Linear Quadratic Systems with Multiplicative Noise via System Level Synthesis.” arXiv, 2022. doi: 10.48550/ARXIV.2204.02883.
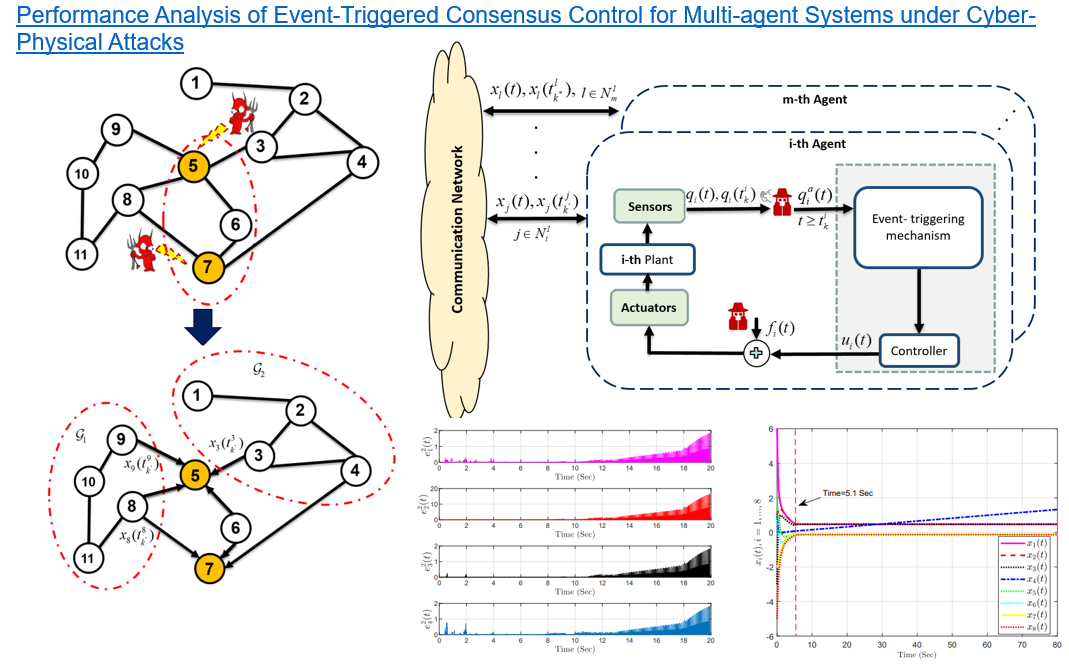
- F. Tatari, A. Mustafa, M. Mazouchi, H. Modares, C. G. Panayiotou, and M. M. Polycarpou, “Performance Analysis of Event-Triggered Consensus Control for Multi-agent Systems under Cyber-Physical Attacks.” arXiv, 2022. doi: 10.48550/ARXIV.2201.02997.
Conference Papers
- M. Mazouchi, S. Nageshrao, and H. Modares, “Automating Vehicles by Risk-Averse Preview-based Q-Learning Algorithm,” IFAC-PapersOnLine, vol. 55, no. 15. Elsevier BV, pp. 105–110, 2022. doi: 10.1016/j.ifacol.2022.07.616. (This paper won the best paper award.)
- M. Mazouchi, Y. Yang, and H. Modares, “Data-driven dynamic multi-objective optimal control: A Hamiltonian-inequality driven satisficing reinforcement learning approach,” IFAC-PapersOnLine, vol. 53, no. 2. Elsevier BV, pp. 8070–8075, 2020. doi: 10.1016/j.ifacol.2020.12.2275.
- F. Tatari, M. Akbarzadeh-T, M. Mazouchi and G. Javid, "Agent-based centralized fuzzy Kalman filtering for uncertain stochastic estimation," 2009 Fifth International Conference on Soft Computing, Computing with Words and Perceptions in System Analysis, Decision and Control, 2009, pp. 1-4, doi: 10.1109/ICSCCW.2009.5379483.
- A. Vahidi-Moghaddam, M. Mazouchi and H. Modares, "Learning Dynamics System Models with Prescribed-Performance Guarantees using Experience-Replay," 2021 American Control Conference (ACC), 2021, pp. 1941-1946, doi: 10.23919/ACC50511.2021.9482731.
- Y. Han, M. Mazouchi, S. Nageshrao and H. Modares, "A One-shot Convex Optimization Approach to Risk-Averse Q-Learning," 2021 60th IEEE Conference on Decision and Control (CDC), 2021, pp. 102-107, doi: 10.1109/CDC45484.2021.9682984.
- Y. Yang, M. Mazouchi and H. Modares, "Data-Driven Solutions to Mixed H2/H∞ Control: A Hamilton-Inequality-Driven Reinforcement Learning Approach," 2020 IEEE Conference on Control Technology and Applications (CCTA), 2020, pp. 340-345, doi: 10.1109/CCTA41146.2020.9206320.
Awards

6th IFAC Conference on Intelligent Control and Automation Sciences (ICONS2022)
Service to Society
- IEEE Transactions on Automatic Control
- Automatica
- IEEE Transactions on Neural Networks and Learning systems
- IEEE Transactions on Systems, Man and Cybernetics: Systems
- IEEE Transactions on Cybernetics
- IEEE Control Systems Letters
- IEEE/CAA Journal of Automatica Sinica
- IEEE Transactions on Network Science and Engineering
- Journal of the Franklin Institute
- Control Theory and Technology
- IET - Control Theory and Applications
- Neurocomputing
- IEEE Transactions on Industrial Electronics
- IEEE Transactions on Control of Network Systems
- IEEE Transactions on Artificial Intelligence
- IEEE Open Journal of Control Systems
- IEEE Transactions on Circuits and Systems II: Express Briefs
- European Journal of Control
- IEEE Computational Intelligence Magazine
- IEEE Systems Journal
- International Journal of Robust and Nonlinear Control
Guest Associate Editor and Topic Editor
- Frontiers in Control Engineering: Adaptive, Robust and Fault Tolerant Control section - Research Topics: "Safe Data-Driven Control and Monitoring in Adversarial Environments" and "Finite-time Learning and Control"
Education
Ferdowsi University of Mashhad
Mashhad, Iran
Degree: Ph.D. Degree in Electrical Engineering in the field of control
Dissertation: Online Sub-optimal Cooperative Control of Multi Agent Systems: Reinforcement Learning Approach
GPA: 4.0/4.0 (Graduated with Honors)
- Real Analysis
- Adaptive Control Systems
- Neural Networks
- Robust Control Systems
- System Identification
- Hybrid Control Systems
Relevant Courseworks:
Ferdowsi University of Mashhad
Mashhad, Iran
Degree: M.Sc. Degree in Electrical Engineering in the field of control
Dissertation: Adaptive Probabilistic Fuzzy Controller in Evolutionary Algorithms for Non-Stationary Environment
GPA: 4.0/4.0 (Graduated with Honors)
- Machine Learning
- Reinforcement Learning
- Multi-agent Systems
- Optimal Control Systems
- Multivariable Control Systemss
- Advanced Engneering Mathematics
- Nonlinear Control Systems
- Game Theory
Relevant Courseworks: